The Adventures of OS
使用Rust的RISC-V操作系统 在Patreon上支持我! 操作系统博客 RSS订阅 Github EECS网站 这是用Rust编写RISC-V操作系统系列教程中的第5章。 目录 → 第4章 → (第5章) → 第6章
外部中断
2019年11月18日: 仅Patreon
2019年11月25日: 公开
视频
https://www.youtube.com/watch?v=99KMubPgDIU
概述
在上一章,我们讨论了CPU以及内核的中断。 在这一章,我们将讨论中断的其中一类——外部中断,这些中断表示发生了某些外部或平台中断。 例如,UART设备可能刚刚填满了它的缓冲区。
平台级中断控制器(The Platform-Level Interrupt Controller)
平台级中断控制器 (PLIC) 通过CPU上的一个引脚——EI (外部中断) 引脚,来路由所有信号,通过 mie 寄存器中的机器外部中断启用 (meie) 位可以启用该引脚。
每当我们看到该引脚已被触发(外部中断待处理)时,我们就可以查询 PLIC 以查看是什么原因造成的。 此外,我们可以将 PLIC 配置为优先考虑中断源或完全禁用某些源,同时启用其他源。
PLIC 寄存器
PLIC 是一个通过 MMIO 控制的中断控制器。 有几个与 PLIC 相关的寄存器:
寄存器 地址 描述
Priority 0x0c00_0000 设置特定中断源的优先级
Pending 0x0c00_1000 包含已触发的中断列表(待处理)
Enable 0x0c00_2000 启用/禁用某些中断源
Threshold 0x0c20_0000 设置中断触发的阈值
Claim(read) 0x0c20_0004 按优先级顺序返回下一个中断
Complete(write) 0x0c20_0004 完成对特定中断的处理
PLIC 如何工作
PLIC 通过外部中断引脚连接到 CPU。 以下架构图来自SiFive's Freedom Unleashed Manual。
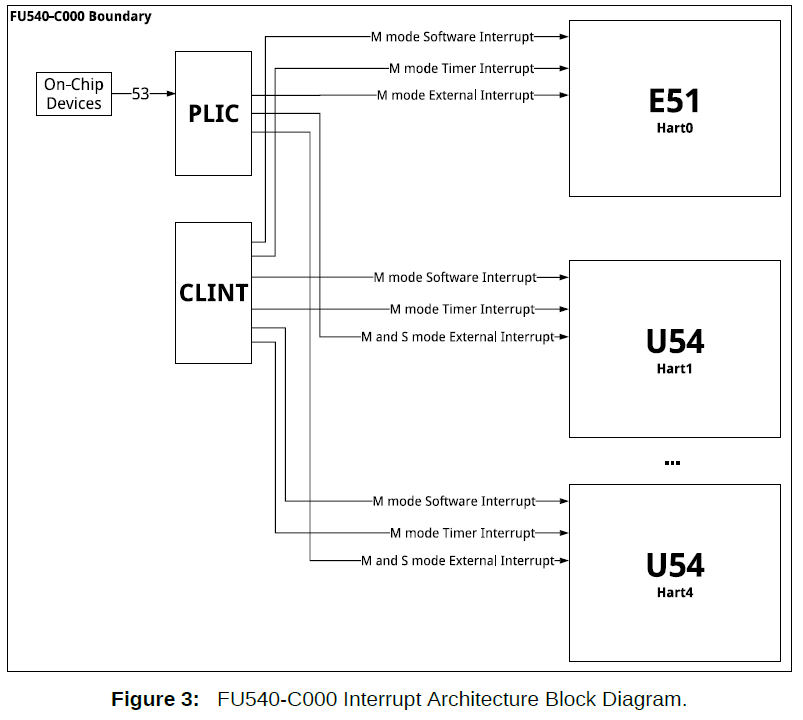
PLIC 连接到外部设备,并通过位于 PLIC 基地址(如上表所示的寄存器)的可编程接口控制它们的中断。 这意味着我们作为程序员可以控制每个中断的优先级,我们是否看到它,我们是否处理过它,等等。
上图可能有点混乱,但在 QEMU 中编程的 PLIC 要简单得多。
PLIC 处理
系统将通过电线将 PLIC 连接到外部设备,我们通常会在技术参考文档或类似文件中获得线号。 但是对于我们来说,我在 qemu/include/hw/riscv/virt.h 中查看到 UART 连接到引脚 10,VIRTIO 设备是 1 到 8,PCI express 设备是 32 到 35。 你可能在想为什么在我们的 Rust 代码中,我们只有一个中断启用寄存器——因为我们不会为了我们的目的而超过中断 10 (UART)。
启用中断源
现在知道了设备通过哪个中断进行连接,我们通过将 1 << id 写入中断启用寄存器来启用该中断。 此示例的中断 ID 将为 UART 的 10。
#![allow(unused)] fn main() { /// 启用给定的中断 id pub fn enable(id: u32) { let enables = PLIC_INT_ENABLE as *mut u32; let actual_id = 1 << id; unsafe { // 与 complete 和 claim 寄存器不同,plic_int_enable // 寄存器是一个位集(bitset),其中 id 是位索引。 // 该寄存器是一个 32 位寄存器,因此我们可以启用 // 中断 31 到 1(0 硬连线到 0)。 enables.write_volatile(enables.read_volatile() | actual_id); } } }
设置中断源优先级
现在已经启用了中断源,我们需要给它一个 0 到 7 的优先级。7 是最高优先级,0 是“scum”类(h/t Top Gear)——但是优先级 0 不能满足任何阈值,因此它基本上禁用了中断(请参阅下面的 PLIC 阈值)。 我们可以通过优先级寄存器设置每个中断源的优先级。
#![allow(unused)] fn main() { /// 将给定中断的优先级设置为给定优先级。 /// 优先级必须为 [0..7] pub fn set_priority(id: u32, prio: u8) { let actual_prio = prio as u32 & 7; let prio_reg = PLIC_PRIORITY as *mut u32; unsafe { // 中断 id 的偏移量是: // PLIC_PRIORITY + 4 * id // 由于我们在 u32 类型上使用指针运算 // 它会自动将 id 乘以 4。 prio_reg.add(id as usize).write_volatile(actual_prio); } } }
设置 PLIC 阈值
PLIC 本身有一个全局阈值,所有中断在“启用”之前都必须通过该阈值。 这是通过阈值寄存器控制的,我们可以将值 0 到 7 写入其中。 任何小于或等于此阈值的中断优先级都无法满足障碍并被屏蔽,这实际上意味着中断被禁用。
#![allow(unused)] fn main() { /// 设置全局阈值,阈值可以是值 [0..7]。 /// PLIC 将屏蔽等于或低于给定阈值的任何中断。 /// 这意味着阈值 7 将屏蔽所有中断,阈值 0 将允许所有中断。 pub fn set_threshold(tsh: u8) { // 我们使用 tsh 是因为我们使用的是 u8 // 但我们的最大数量是 3 位 0b111。 // 所以,我们与 7 (0b111) 求 and 来获取最后三位。 let actual_tsh = tsh & 7; let tsh_reg = PLIC_THRESHOLD as *mut u32; unsafe { tsh_reg.write_volatile(actual_tsh as u32); } } }
处理 PLIC 中断
PLIC 将通过异步原因(asynchronous cause) 11(机器外部中断)向我们的操作系统发出信号。 当处理这个中断时,我们不会知道实际上是什么导致了中断——只知道 PLIC 导致了它。 这是声明(claim)/完成(complete)过程开始的地方。
声明一个中断
SiFive 将声明/完成过程描述如下:
10.7 中断声明过程
FU540-C000 hart 可以通过读取
claim/complete寄存器(表 45)来执行中断声明,该寄存器返回最高优先级的挂起中断的 ID,如果没有挂起的中断,则返回零。 成功的声明还会原子地清除中断源上相应的pending位。FU540-C000 hart 可以随时执行声明,即使其
mip(表 22)寄存器中的 MEIP 位未设置。声明操作不受优先级阈值寄存器设置的影响。
10.8 中断完成
FU540-C000 hart 通过将其从声明中接收到的中断 ID 写入
claim/complete寄存器(表 45)来发出它已完成执行中断处理程序的信号。 PLIC 不检查完成 ID 是否与该目标的最后一个声明 ID 相同。 如果完成 ID 与当前为目标启用的中断源不匹配,则g该完成会被静默忽略。
claim寄存器将返回按优先级排序的下一个中断。 如果寄存器返回 0,则没有挂起的中断,这不应该发生,因为我们将通过中断处理程序处理声明过程。
#![allow(unused)] fn main() { /// 获取下一个可用中断,这就是“claim声明”过程。 // plic 会自动按优先级排序,并将中断的 ID 交给我们。 // 例如,如果 UART 正在中断并且为下一个,我们将得到值 10。 pub fn next() -> Option { let claim_reg = PLIC_CLAIM as *const u32; let claim_no; // 声明寄存器填充了最高优先级的已启用中断。 unsafe { claim_no = claim_reg.read_volatile(); } if claim_no == 0 { // 中断 0 硬连线到 0,这告诉我们没有要声明的中断 // 因此我们返回 None。 None } else { // 如果到达这里,我们就会得到一个非 0 中断。 Some(claim_no) } } }
然后,我们可以要求 PLIC 通过该声明寄存器向我们提供任何发起中断的编号。 在 Rust 中,我通过匹配将其驱动到正确的处理程序。 到目前为止,我们直接在中断上下文中处理它——这是一个坏主意,但我们还没有任何延迟任务系统。
#![allow(unused)] fn main() { // 机器外部 (来自 PLIC 的中断) // println!("Machine external interrupt CPU#{}", hart); // 我们将检查下一个中断。 如果中断不可用,则将给我们 None。 // 然而,这意味着我们得到了一个虚假的中断,除非 // 我们得到一个来自非 PLIC 源的中断。 这是 PLIC 将 id 0 硬连线 // 到 0 的主要原因,因此我们可以将其用作错误案例。 if let Some(interrupt) = plic::next() { // 如果我们到达这里,我们就会从声明寄存器中得到一个中断。 // PLIC 将自动为下一个中断设置优先级,因此当我们从声明中获取它时, // 它将是优先级顺序中的下一个。 match interrupt { 10 => { // 中断 10 是 UART 中断。 // 我们通常会将其设置为在中断上下文之外进行处理, // 但我们在这里进行测试! 来吧! // 我们还没有为 my_uart 使用单例模式,但请记住, // 这只是简单地包装(wrap)了 0x1000_0000 (UART)。 let mut my_uart = uart::Uart::new(0x1000_0000); // 如果我们到了这里,UART 最好有一些东西! 如果不是,会发生什么?? if let Some(c) = my_uart.get() { // 如果您认识这段代码,它曾经位于 kmain() 下的 lib.rs 中。 // 那是因为我们需要轮询 UART 数据。 // 既然现在我们有中断了,那就来吧! match c { 8 => { // 这是一个退格,所以我们基本上必须写一个空格,再写一个退格: print!("{} {}", 8 as char, 8 as char); }, 10 | 13 => { // 换行或回车 println!(); }, _ => { print!("{}", c as char); }, } } }, // 非UART中断在这里并且什么也不做。 _ => { println!("Non-UART external interrupt: {}", interrupt); } } // 我们已经声明了它,所以现在假设我们已经处理了它。 // 这将重置挂起的中断并允许 UART 再次中断。 否则,UART 将“卡住”。 plic::complete(interrupt); } }
告诉 PLIC 我们需要擦除(wiping)
当我们声明一个中断时,我们是在告诉 PLIC 它将被处理或正在被处理。 在此期间,PLIC 不会再监听来自同一设备的任何中断。 这是 complete 过程的开始。 当我们写入(而不是读取)声明寄存器时,我们给出一个中断的值来告诉 PLIC 我们已经完成了它给我们的中断。 然后,PLIC 可以重置中断触发器并等待该设备将来再次中断。 这会重置系统并让我们一遍又一遍地循环回到声明/完成。
#![allow(unused)] fn main() { // 通过 id 完成一个挂起的中断。 id 应该来自上面的 next() 函数。 pub fn complete(id: u32) { let complete_reg = PLIC_CLAIM as *mut u32; unsafe { // 我们实际上将一个 u32 写入整个 complete_register。 // 这与声明寄存器是同一个寄存器, // 但它可以根据我们是在读还是在写来区分。 complete_reg.write_volatile(id); } } }
就是这样。 PLIC 已被编程,现在它只处理我们的 UART。 请注意在 lib.rs 中我删除了 UART 轮询代码。 现在有了中断,我们只能在它向我们发出信号时处理 UART。 由于我们使用等待中断 (wfi) 将 HART 置于等待循环中,我们可以节省电力和 CPU 周期。
让我们将它添加到我们的 kmain 函数中,看看会发生什么!
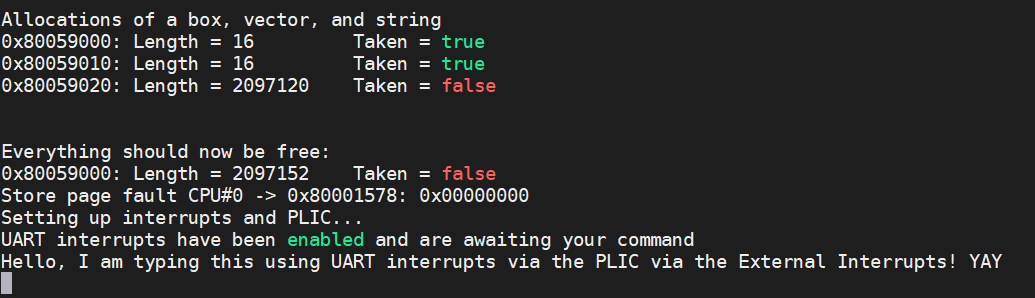
#![allow(unused)] fn main() { // 让我们通过 PLIC 设置中断系统。 // 我们必须将阈值设置为不会屏蔽所有中断的值。 println!("Setting up interrupts and PLIC..."); // 我们降低了阈值墙,这样我们的中断就可以跃过它。 plic::set_threshold(0); // VIRTIO = [1..8] // UART0 = 10 // PCIE = [32..35] // 启用 UART 中断。 plic::enable(10); plic::set_priority(10, 1); println!("UART interrupts have been enabled and are awaiting your command"); }
当我们运行(make run)这段代码时,我们得到以下信息。 我输入了底线(bottom line),但它表明我们现在正在通过 PLIC 处理中断!